Cette page vous donne modestement quelques détails sur la conception et les réglages de l'APM 2.5, ainsi que sa mise en place sur un copter (page 2), et tout cela en français, et oui, j'en avais assez de voir que seuls les Anglais donnaient des "TUTO's"... Par contre, pour les vidéos... attendez un peu !
Je vous informe que je ne suis en aucun cas responsable d'une fausse manipulation, ou encore d'une possible erreur, cependant j'ai agi de la sorte sur mon modèle et il fonctionne encore !!!!
 |
 |
|---|
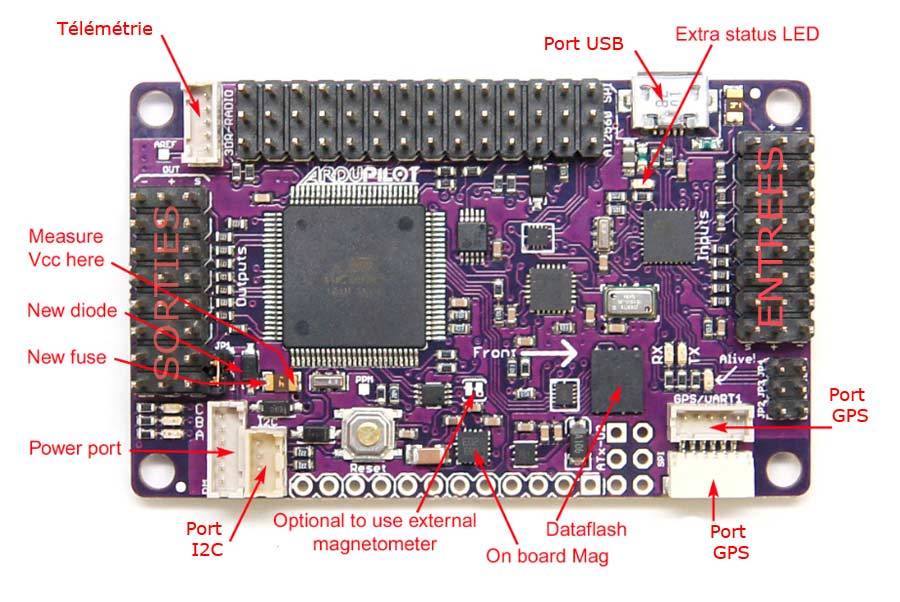
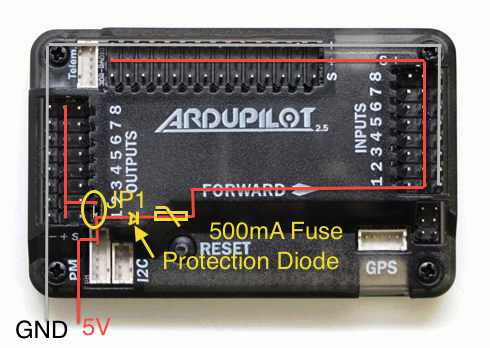
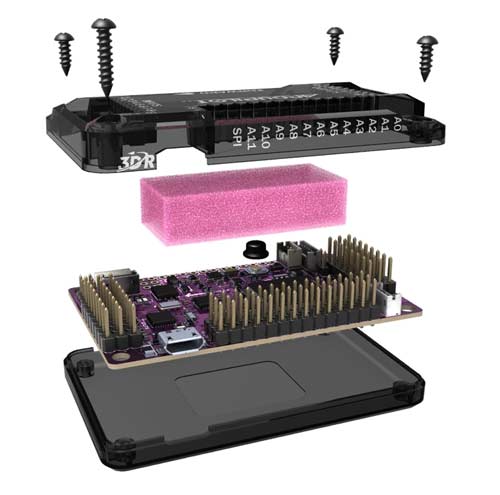
Il y a à présent une diode de protection, ainsi qu'un fusible sur l'alimentation, de plus une mousse non conductrice est placée à l'intérieur (non pour les vibrations, mais pour isoler le capteur de pression de la lumière qu'il ne supporte pas)
Perso je l'ai reçu ainsi ICI à 140$ + 4 $ pour la livraison (sous 10 jours)
APM 2.5, GPS, Télémétrie en 433MHz (le 915MHz est interdit en France)
mais sans le boitier (que je vais réaliser).

Première mise en place
Ne connectez pas ArduFlyer 2.5 à votre ordinateur portable ou un port USB de l'ordinateur avant d'installer , et mis en route le planificateur de mission (Mission Planner) , Windows peut installer les pilotes, mais mal, et vous allez perdre beaucoup de temps à essayer de corriger cela.
Mission Planner peut être téléchargé à partir d'ici.
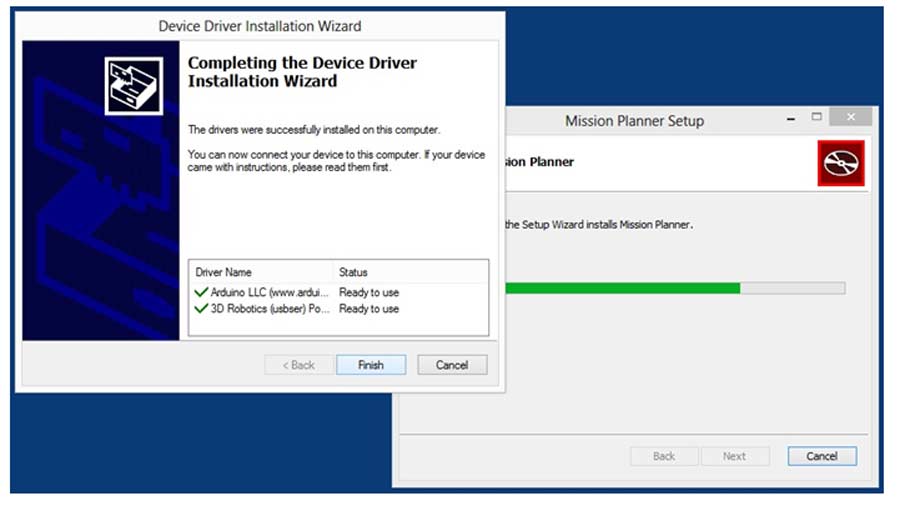
Lorsque vous exécutez l'installation du planificateur de mission,
accepter toutes les choses habituelles et assurez-vous que vous laissez les pilotes soient installés
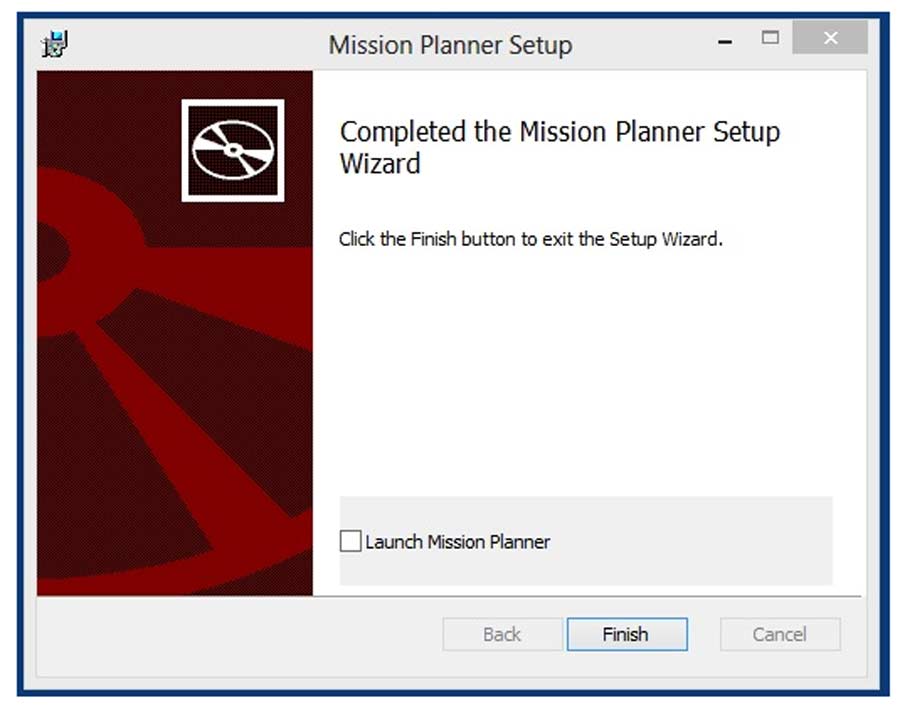

Et voilà !!!!
L'installation de planificateur de mission n'installe pas de raccourci dans le menu Démarrer, vous aurez à faire vous-même.
Créer un raccourci sur le bureau
Lancez l'Explorateur Windows et naviguez jusqu'à l'emplacement planificateur de mission est installé C: Program Files (x86) APM Planner puis clic droit "Créer un raccourci sur le bureau"...
démarrer planificateur de mission
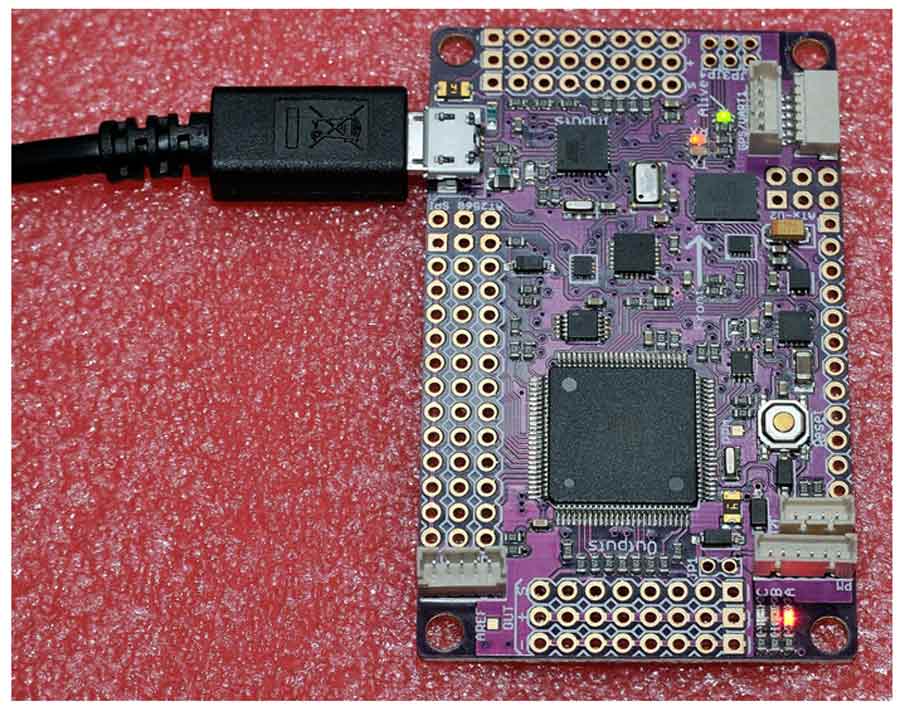
Maintenant, vous pouvez vous connecter ArduFlyer 2.5 à votre PC ou ordinateur portable Port USB ATTENTION: Le connecteur USB sur ArduFlyer 2.5 [en fait n'importe quel connecteur USB] avant qu'elle n'ait jamais eu un câble USB branché, il est plutôt serré, utilisez un câble USB de haute qualité qui s'adapte à la prise de la carte correctement, si elle ne s'adapte pas ne pas forcer ou vous briser le connecteur de la carte et qui ne peut pas être réparé.(perso, j'ai utilisé mon cable smartphone SAMSUNG) elle est du même modèle !
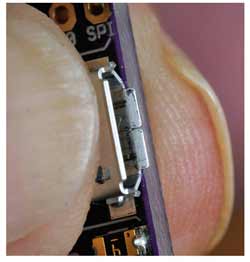 |
Lorsque vous insérez le câble USB tenir la prise de la carte USB [pas la carte], le pouce au-dessus de la prise USB, un doigt sous le bord inférieur à la prise USB. De cette façon, la force nécessaire pour brancher le câble USB pour la première fois. Maintenez la prise USB de la même façon entre le pouce et l'index lorsque vous allez à débrancher le câble USB. La première fois que vous vous connectez ArdUflyer 2.5 il apparaîtra à ne rien faire avec un seul voyant vert allumé pendant environ 30 secondes, puis LEDS bleues et rouges se mettent à clignoter et il devrait se retrouver avec le Rouge "A" LED clignote lentement avec la LED verte s'allume. Si au bout de 60 secondes, si les LED ont pas fait leur démarrage, quelque chose ne va pas, essayez un autre port USB ou essayer un autre câble USB jusqu'à ce qu'il fonctionne. |
 |
|---|
Mission Planner En haut à droite de l'écran à côté du mot AUTO il ya une liste déroulante,
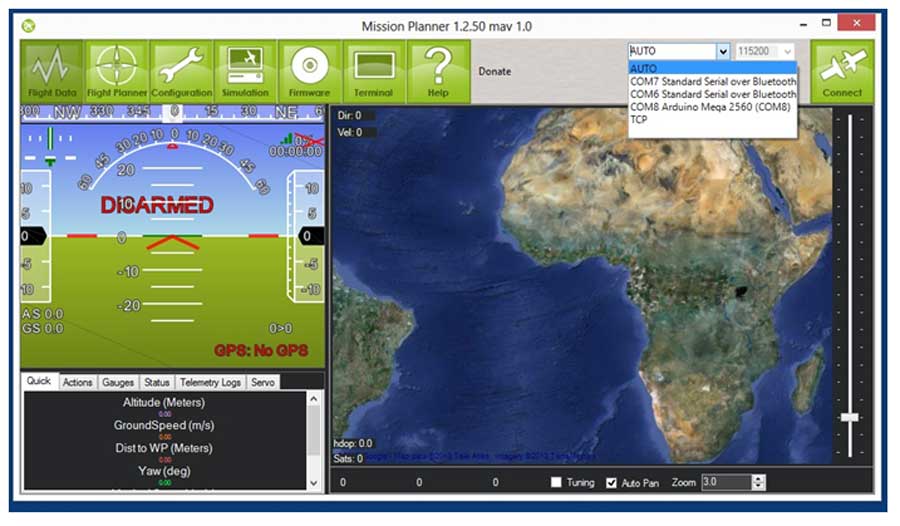
cliquez dessus et attendre pour qu'il trouve tous les périphériques connectés.
Note: Mission Planner a un bug qui ralenti votre ordinateur, sur Windows 7 sur le bouton pour "Afficher les périphériques cachés" est dans le Gestionnaire de périphériques, mais elle est désactivée, donc il faut l'activer, instructions faciles pour le faire sont ici ... Quoi qu'il en soit c'est pénible, donc soyez patient, il va scanner deux fois. cliquez sur la ligne qui contient COMx Arduino Mega 2560 (COMx)
[COMx est COM8 dans mon cas] Com8 remplacera Auto
PS : Assurez-vous que 115200 est sélectionné pour la vitesse de transmission
cliquez en haut à droite sur Connect , vous devriez voir une liste de paramètres lent être lu comme dessous

Alors vous devriez voir l'horizon artificiel, une boussole et un altimètre...
Rappelez-vous, la flèche blanche sur le tableau étiqueté avant les points à l'avant de la carte [le nez de l'engin], le câble USB se trouve sur le côté gauche de la carte Soulevez le côté gauche, votre Horizon artificiel devrait ressembler à ceci:

Beaucoup de gens pensent d'abord que l'horizon artificiel est erroné [se penchant dans le mauvais sens] parce qu'ils ne sont pas habitués à cela, pensez-y de cette façon, la ligne entre vert [le sol] et Bleu [Sky] est l'horizon. Lorsque nous levons le côté gauche de notre carte, en supposant que c'est un avion, l'aile droite va plonger vers le bas et se rapprocher de la terre qui est exactement ce que l'horizon artificiel est. Les 2 lignes rouges horizontales sont les ailes de l'avion. Vous pouvez activer la carte et observer la boussole en mouvement,la boussole pour être correcte doit être calibrée. L'horizon artificiel peut pas être au niveau, encore une fois, il n'a pas encore été calibré.
CALIBRER LA CARTE
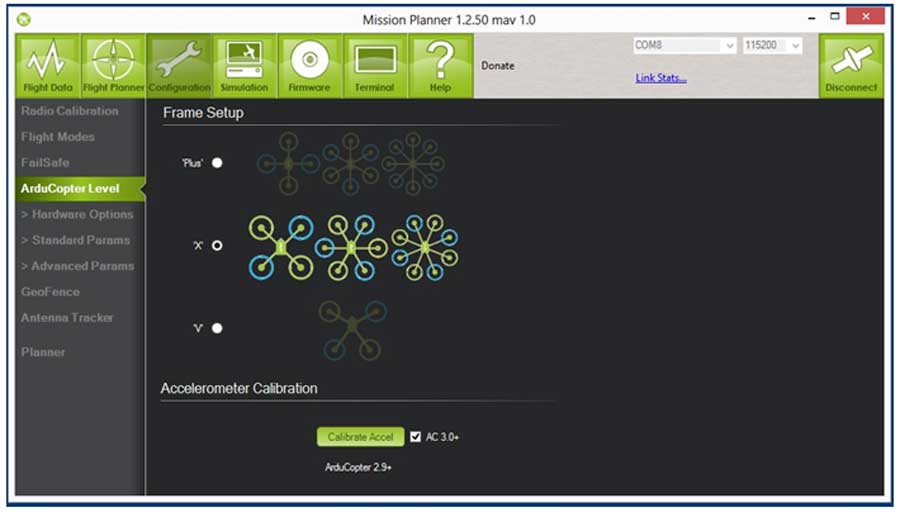
Cliquez sur Configuration, ensuite cliquez sur Arducpter Level, choisissez votre type d'hexacotere, et cliquez sur Calibrate Accel, des instructions seront affichées, placer la carte comme il est demandé, puis appuyez sur n'importe quelle touche, un autre message apparaît, suivez toutes ces placements, quand il vous dit de faire le côté gauche (câble USB), placer la carte sur le bord d'une table de sorte que le câble tombe sur le bord et appuyez sur n'importe quelle touche. Lorsque vous avez fait toutes les positions, vous devriez voir ce message Calibration succesfull confirmer que votre accéléromètre est OK,
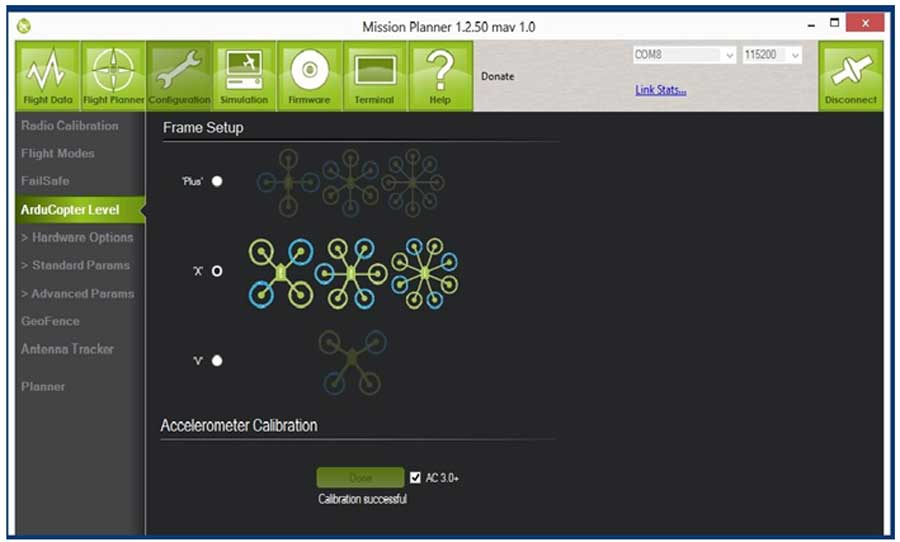
si elle échoue, refaire la calibration soigneusement à nouveau, si elle continue d'échouer vous pouvez avoir un accéléromètre endommagé.
(page 2)